Currently Empty: $0,00
4-Axis Robot Arm
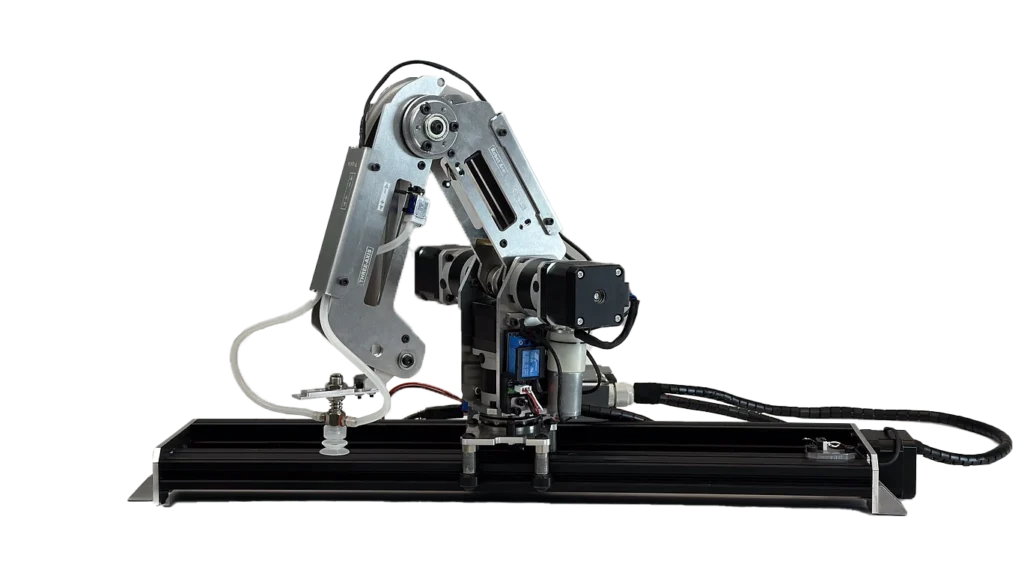
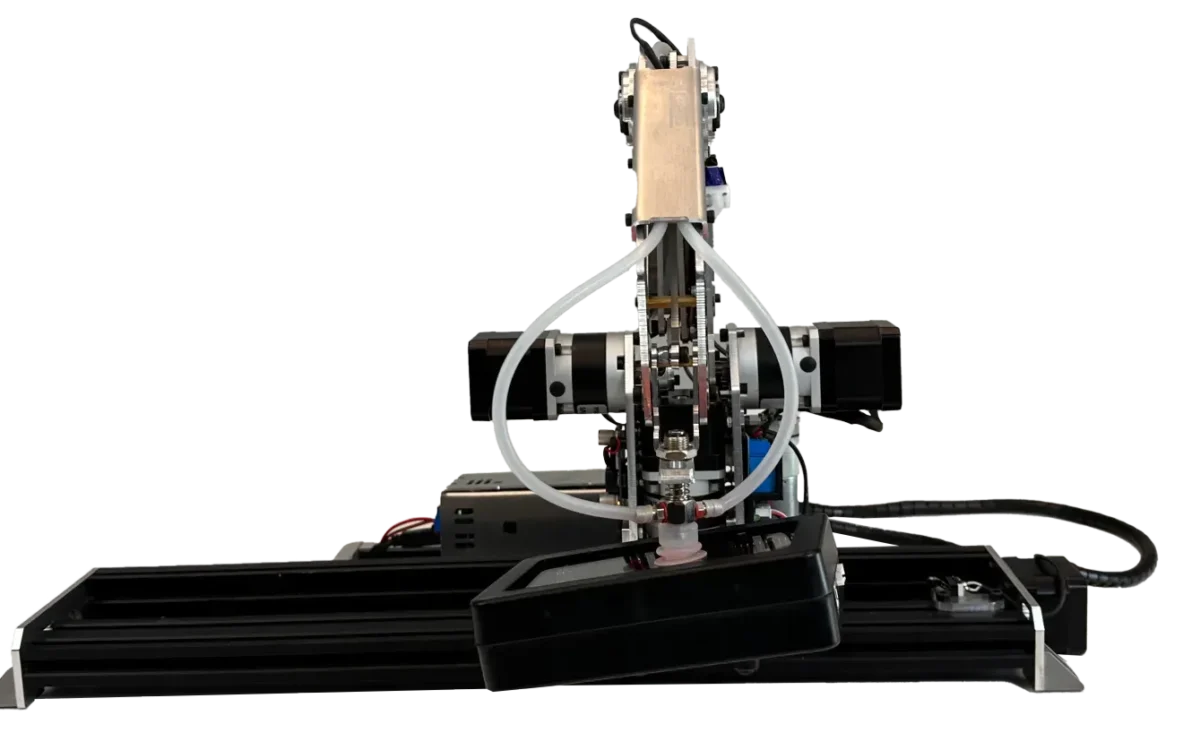
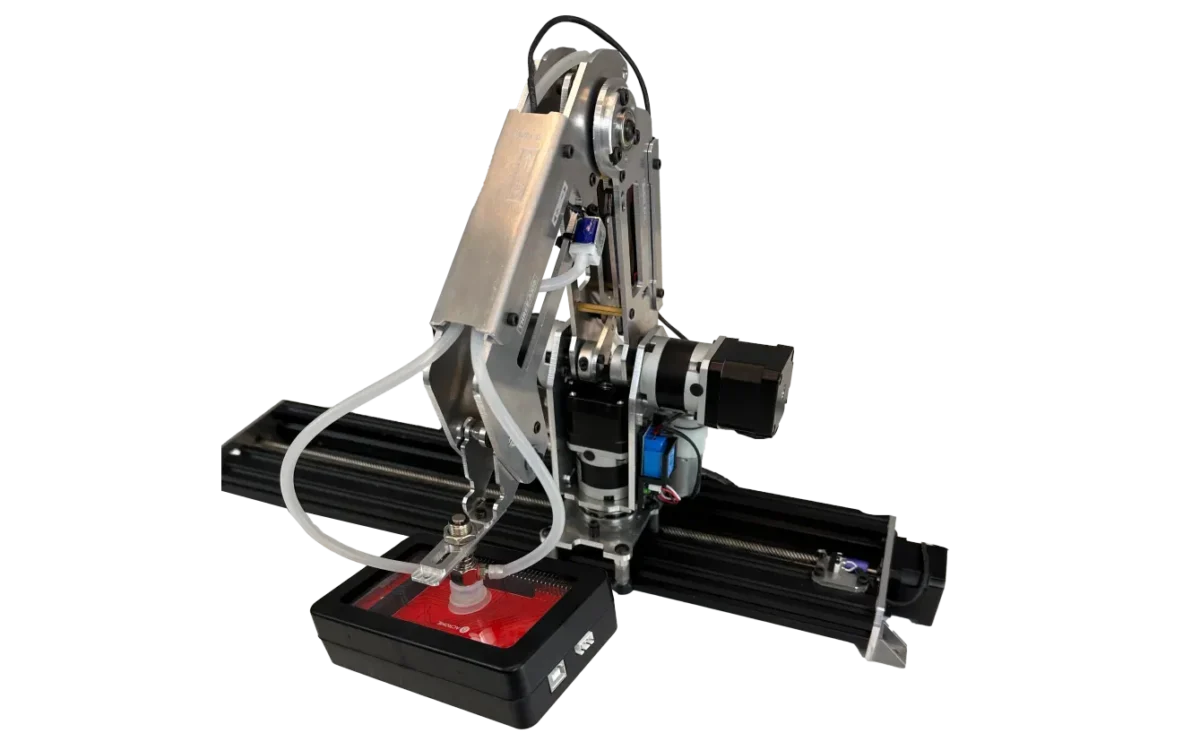
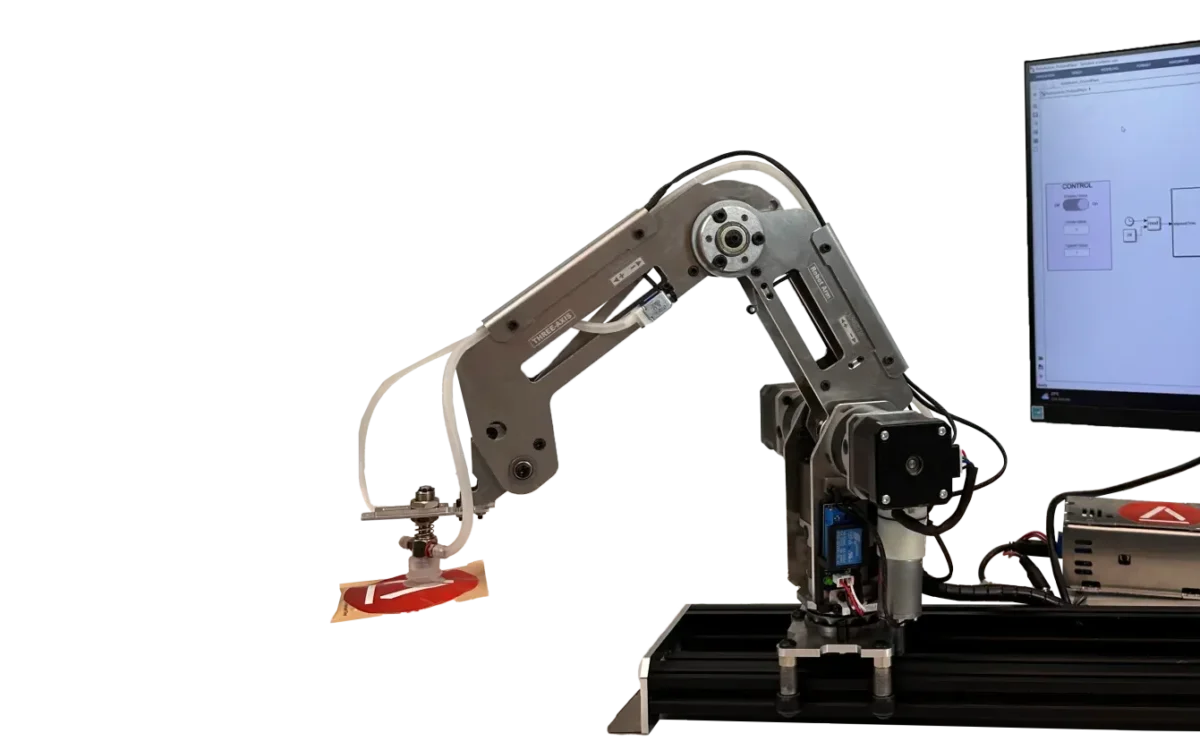
ACROME 4-axis robotic arm is an educational serial-parallel manipulator with an extra slider axis, suitable for teaching kinematics concepts and pick and place applications.
OVERVIEW
ACROME 4-Axis Robot Arm, with its user friendly components, is a hands-on robotic experiment system, suitable for teaching robotics mainpulators and applications in an optimized way. Open source example codes make it possible for students and researchers to modify and test their algorithms. With built-in pneumatic gripper and slider rail, it is a compact and comprehensive tool for robotics education and research.
SOFTWARE
- Python
- MatLab/Simulink
CONTROLLER
- Raspberry Pi + Shield
PRODUCT PHOTOS
SPECIFICATIONS
Payload
1 kg.
Workspace
100 - 230 mm. (-/+ 5 mm.) in X,Y - 260 mm. (-/+ 5 mm) in Z.
Position Repeatability
± 5 mm.
Angular Sensitivity
1°
Max. Speed
0.166s / 60°
Height (min-max) / Weight
20 mm - 260 mm (-/+ 5 mm) / 3.6 kg
Platform Dimensions (Length * Width)
580 mm * 98 mm (-/+ 2 mm)
Base Dimensions (Length * Width)
97 mm * 63 mm
Power Requirement
12Vdc - 3A
Magnet Diameter
20mm. (± 1mm.)
Motor Type
DC Stepper Motors
Feedback Sensors
Optional camera
FEATURES
Assembled 4-Axis serial-parallel kinematic arm robot
Linear slider for enhanced workspace
1 kg payload at maximum reach. 100 - 230 mm. (-/+ 5 mm.) workspace
Compatible with MATLAB®/Simulink® and Python
Enables users to create their own robotic applications
Aluminum, Reliable Structure
Actuating the robot by precision stepper motors
Position can be controlled
Denevit-Hartenberg convention model for serial kinematic arm robot in MATLAB®/Simulink®
Open source software architecture with extensive courseware, suitable for undergraduate and graduate studies
FAQs
What is 4-Axis Robot Arm?
4-Axis Robot Arm is the new member of the Acrobot series. It is an open-source, accessible serial kinematics robotic arms built by ACROME.
What is the 4-Axis Robot Arm used for?
4-Axis Robot Arm is used for teaching robotic algorithms and showcase robotic applications. Users can use existing example algorithms or can develop their own controls and serial kinematic algorithms.
Does the product have built-in kinematics solver?
Yes. The courseware has rich example codes including the kinematics calculations with documentation.
Does it have a gripper?
Yes it has a vacuum end-effector to grip the objects having flat surfaces.
Does the product comes with a controller and software/courseware?
Product comes with the controller, software and a companion courseware with example source codes.
Is there any after-sales support or training for the product?
A complimentary online support session is available after the delivery of the products. Standard support is provided via phone, e-mail or remote desktop connection.
CURRICULUM
COMPONENTS OF ACROBOT
Stepper Motors Controller
ACROME Power Unit
Mechanics of the System
ACROME Power Unit
Mechanics of the System
FUNDAMENTALS OF SERIAL KINEMATIC CHAINS
DenavitHartenberg Convention
Inverse Kinematics
Inverse Kinematics
TRAJECTORY GENERATION
General Considerations in Path Description and Generation
Cartesian Space Schemes
Joint Space Schemes
Cubic Polynomials
Higher Order Polynomials
Linear Function with Parabolic Blends
Cartesian Space Schemes
Joint Space Schemes
Cubic Polynomials
Higher Order Polynomials
Linear Function with Parabolic Blends
LINEAR CONTROL OF MANIPULATORS
Feedback and Closed-Loop Control
Control of Second Order Linear Systems
Trajectory Following Control
Modeling and Control of a single Joint
Control of Second Order Linear Systems
Trajectory Following Control
Modeling and Control of a single Joint
RELATED BLOGS

Building a 4-DoF Serial Robotic Arm with Smart Motion Devices
10Min
This article provides information on building a 4-DoF robotic arm in a do-it-yourself fashion. The bill of materials information and links to CAD files of the linkage and mounting parts are given. The article recommends using Smart Motion Devices for controlling the actuators, as this will make things easier and cleaner in cabling.
Building a 4-DoF Serial Robotic Arm with Smart Motion Devices
10Min
This article provides information on building a 4-DoF robotic arm in a do-it-yourself fashion. The bill of materials information and links to CAD files of the linkage and mounting parts are given. The article recommends using Smart Motion Devices for controlling the actuators, as this will make things easier and cleaner in cabling.