1-DoF Copter Basic is a compact QuakeLogic educational platform for single-axis flight dynamics, feedback-control instruction and mechatronics laboratory work. It is intended for universities, robotics instructors and student project teams that need a focused control-system training product.
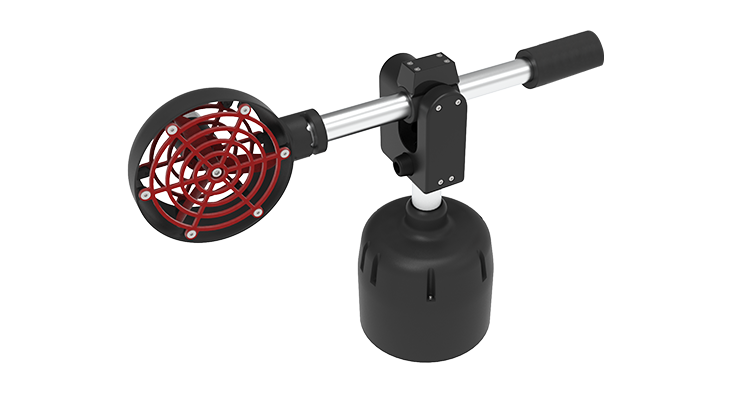
The 1-DOF Copter has been thoughtfully developed to provide a simplified yet powerful platform for exploring intelligent control strategies used in modern flight systems. By integrating a high-performance DC motor, a compatible Electronic Speed Controller (ESC), and a high-resolution rotary encoder, the system simulates the core dynamics found in quadcopters, rockets, hovercrafts, and underwater vehicles.
This educational tool is complemented by ready-to-use courseware, making it ideal for students and researchers to gain hands-on experience with key principles in control systems engineering. The system emphasizes topics such as system modeling, linearization, controller design, and frequency response analysis, fostering a deep understanding of real-world mechatronic applications.
The fully open-source software architecture encourages academic exploration and innovation, allowing users to modify control algorithms or develop entirely new control structures tailored to their research or coursework.
🔧 Components of a 1-DOF Copter System
DC Motor
Electronic Speed Controller (ESC)
Rotary Encoder
Control Unit
Power Supply Unit
Mechanical Structure
⚙️ PWM (Pulse Width Modulation) Fundamentals
Theory Behind PWM Signaling
Techniques for Generating PWM Signals
Visualization and Monitoring of PWM Signals
Open-Loop Motor Speed Control Using ESC
🔁 Feedback in Control Systems
Acquiring Angular Position Data from Encoder
Introduction to Signal Filtering Techniques
📐 System Modeling
Derivation of Nonlinear Equations of Motion
Linearization Techniques
Mathematical Modeling of the 1-DOF Helicopter System
📊 Performance Evaluation Metrics
Time-Domain Response Characteristics
Steady-State Behavior and Error Analysis
🧠 Control System Design
Overview of Controller Types and Functions
Design and Implementation of Linear Controllers
This comprehensive learning platform bridges theoretical foundations with practical implementation, equipping learners with the knowledge and skills necessary to excel in the fields of robotics, aerospace, and control engineering.
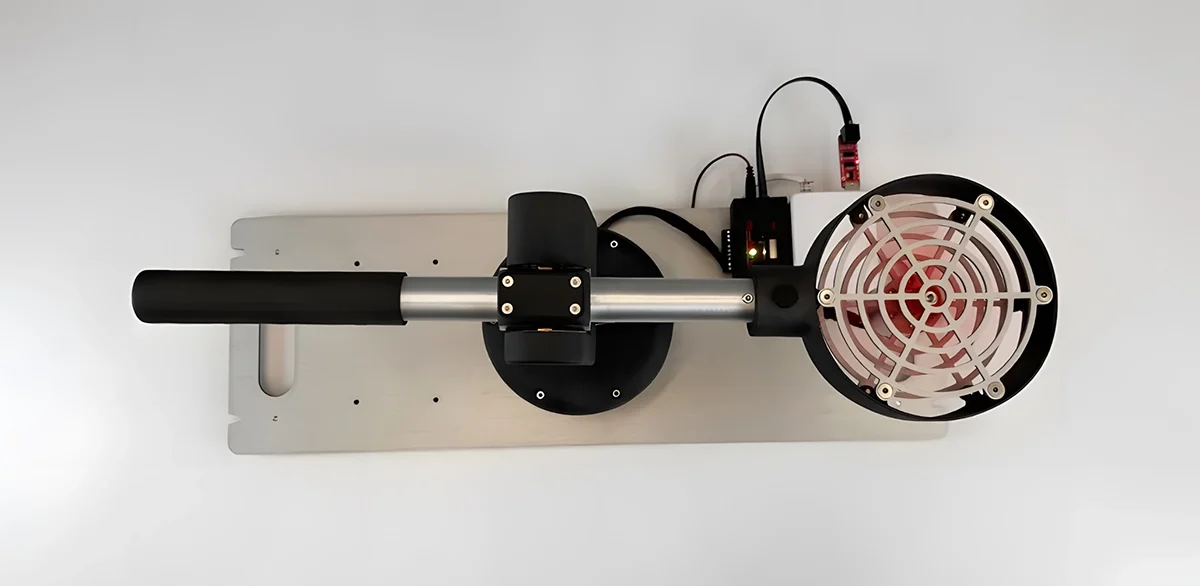
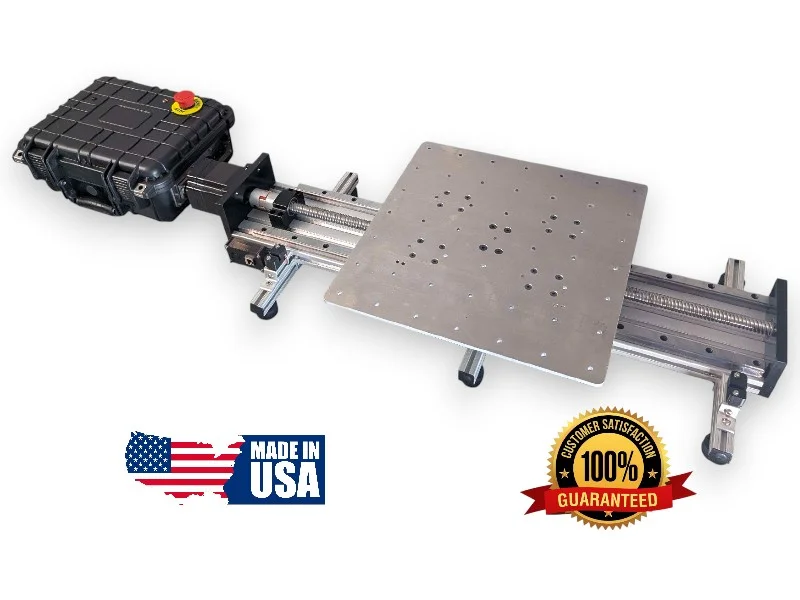
PRODUCT PHOTOS
SPECIFICATIONS
Workspace
± 30° in Pitch
Position Repeatability
0.36°
Angular Sensitivity
0.36°
Max. Speed
45 °/second
Height (min-max)
280mm. - 500mm. (± 2mm.)
Platform Dimensions (Length * Width)
510mm. x 146mm. (± 2mm.)
Base Dimensions (Length * Width)
600mm. x 200mm. (± 2mm.)
Weight
3,200 gr.
Propeller Wingspan
62mm. (± 0.5mm.)
Motor Type
Brushed DC Motor with Built-In Encoder
Feedback Sensors
Encoder, IMU (optional)
Power Requirement
12V - 3A
FEATURES
Solid body for precise motion and measurement
High resolution incremental encoder for angle measurement of rotor arm
Assembled and ready to control plant with the integrated power unit
Fully compatible with MATLAB®/Simulink® and LabVIEW™
Enables students to create their own real-time algorithms
Getting Started Program with rich Graphical User Interface for out-of-the-box user experience
Motor compatible electronic speed controller
Implementation of advanced digital control techniques
Fully documented system models and parameters provided for MATLAB®/Simulink®, LabVIEW™
Open architecture with extensive courseware, suitable for undergraduate courses for engineering disciplines related to control systems
FAQs
What is 1-DoF Copter?
The 1-DoF Copter is an automatic control system, used for teaching control systems and various control algorithms.
What is a 1-DoF Copter used for?
The 1-DoF Copter is used for trying different algorithms to control its upper arm position in different vertical angles via changing the thrust of its propellors.
What are the feedback sensors available?
An encoder is used to determine the angle of the moving arm. The DC motor has also an optional built-in encoder to measure its speed in real time. Product can also optionally be provided with an Inertial Measurement (IMU) sensor to measure the tilt angle of its arm.
Can I use the product for trying different controller types other than PID?
Yes you can. There are other simple controller types available such as On/Off (ie. bang/bang), P, PD. The Product is delivered as an open-source system and users are free to try their own different control algorithms.
Does the product comes with a controller and software/courseware?
Product comes with the controller, software and a companion courseware with example source codes.
Is there any after-sales support or training for the product?
A complimentary online support session is available after the delivery of the products. Standard support is provided via the phone, e-mail or remote desktop connection.
RELATED BLOGS
Acrome Products Role in Prof. Claudia Yaşar's Teaching Approach
6Min
Explore how Prof. Claudia Yaşar utilizes Acrome products in her teaching approach to enhance hands-on engineering learning experiences and prepare students for real-world success.
Safe Operation and Maintenance Guidelines for Shake Tables
3Min
Our shake tables are precision instruments designed for safe and reliable operation in research and educational settings. Adherence to the following guidelines ensures optimal performance, safety, and compliance with operational standards.
Find products, compare options, and explore engineering applications.
This AI assistant searches QuakeLogic product, technical, blog, datasheet, and case-study content. Answers may be incomplete or inaccurate and must be verified by QuakeLogic before purchase, engineering design, compliance, safety, or regulatory decisions. Do not share confidential, export-controlled, classified, financial, or sensitive personal information. Use this feature as a starting point only.
This web site (the “Site“) is owned and operated by QUAKELOGIC (“we“, “us” or “our“).The use of this Site and the content and information available on this Site (collectively the “Services“) shall be subject to acceptance of and compliance with the terms and conditions set forth in these terms of use (collectively, the “Terms of Use“) and elsewhere on this Site. The terms “you,” “your“, “yours“, “member” “members” and “yourself” refer to all visitors/members to this Site. Your agreement to comply with and be bound by these Terms of Use is deemed to occur upon your first use of the Site. If you do not agree to these Terms of Use, you should not review information or obtain goods, services or products from this Site. The QUAKELOGIC has the total right to edit or delete any content in the Site, including this Agreement, without notifying you.
If you have any questions, comments, or concerns regarding these terms or the Services, please contact us at su*****@********ic.net.
We are constantly trying to improve our Services, so these Terms may need to change along with the Services. We reserve the right to change the Terms at any time, but if we do, we will bring it to your attention by placing a notice on the website, by sending you an email, and/or by some other means.
If you don’t agree with the new Terms, you are free to reject them; unfortunately, that means you will no longer be able to use the Services. If you use the Services in any way after a change to the Terms is effective, that means you agree to all of the changes.
Except for changes by us as described here, no other amendment or modification of these Terms will be effective unless in writing and signed by both you and us.
WHAT ABOUT MY PRIVACY ?
QUAKELOGIC takes the privacy of its users very seriously. Please review our current Privacy Policy to learn more.
The Children’s Online Privacy Protection Act (“COPPA”) requires that online service providers obtain parental consent before they knowingly collect personally identifiable information online from children who are under 13. We do not knowingly collect or solicit personally identifiable information from children under 13; if you are a child under 13, please do not attempt to register for the Services or send any personal information about yourself to us. If we learn we have collected personal information from a child under 13, we will delete that information as quickly as possible. If you believe that a child under 13 may have provided us personal information, please contact us at su*****@********ic.net.
PRIVACY POLICY
Effective Date: 16 May 2019
SECTION 1 – WHAT DO WE DO WITH YOUR INFORMATION?
The processing of personal data, such as the name, address, e-mail address, or telephone number of a data subject shall always be in line with the General Data Protection Regulation (GDPR), and in accordance with the country-specific data protection regulations applicable to QUAKELOGIC. By means of this data protection declaration, our enterprise would like to inform the general public of the nature, scope, and purpose of the personal data we collect, use and process. Furthermore, data subjects are informed, by means of this data protection declaration, of the rights to which they are entitled.
When you fill out the form on our website or sign up to user interface, we collect the personal information you give us such as your name, address, phone number and email address. This information is used for order fulfillment and will NEVER be sold to a third party for profit.
When you browse our website, we also automatically receive your computer’s internet protocol (IP) address in order to provide us with information that helps us learn about your browser and operating system.
Email marketing (if applicable): With your permission, we may send you emails about our new products and other updates.
SECTION 2 – CONSENT
How do you get my consent?
During the checkout process you will be prompted with a required check box that ‘you agree with the storage and handling of your data by this website’.
If we ask for your personal information for a secondary reason, like marketing, we will either ask you directly for your expressed consent, or provide you with an opportunity to say no.
In summary, your rights include the right to:
Basic information (such as our identity, or that of the controller if not us, the reason and basis on which we process your personal data, together with as much information to ensure fairness and transparency) and to be informed
Object: To object to processing of personal data where such is done by us in certain circumstances, for example for our legitimate interests or direct marketing
Withdraw consent: To withdraw your previously given consent
Access: To be aware of and verify the lawfulness of the processing
Rectification: To correct personal data if it is inaccurate or incomplete
Erasure: To request the removal or deletion of personal data
Restrict processing: To restrict the processing of personal data
Data portability: To obtain and reuse personal data
Be aware of any automated decision making or profiling, and to request such is restricted
How do I withdraw my consent?
If after you opt-in, you change your mind, you may withdraw your consent for us to contact you, for the continued collection, use or disclosure of your information, at any time, by contacting us at su*****@********ic.net.
SECTION 3 – PROCESSING OF PERSONAL INFORMATION
Depending on the circumstances for processing, personal information we process will include: title/salutation; name; address; country or location; employer; e-mail addresses; telephone numbers; IP address and information obtained from that address; information we obtain from use of cookies on your computer.
We may also process other personal information about you when needed to provide data, software, products, services or other information that you requested. We will make you aware of what personal information we are processing at the time of when we obtain it.
We do not process any sensitive personal information about you. You should not provide us with any sensitive personal information. Any sensitive personal information provided to us will be deleted.
SECTION 4 – DISCLOSURE
We may disclose your personal information if we are required by law to do so or if you violate our Terms of Service.
SECTION 5 – DATA STORAGE
Your data is stored on a secure server behind a firewall.
SECTION 6 – THIRD-PARTY SERVICES
We will never sell your information to a third party.
We will only share your information with a third party or transfer your data outside of the UK / EU if we need to. Where we do this we will comply with all of our legal obligations and we ensure that there are adequate protections in place to protect your information.
If we need your consent we will:
Explain why we need to share your personal information
Explain the purpose for which we will be sharing it
Provide you with details of the third party
Obtain your explicit consent for such.
You will be able to easily withdraw your consent by contacting us at su*****@********ic.net.
Where we rely on a different lawful basis, such as ‘legitimate interests’ or ‘contractual’, we will do so only to the extent permitted by such lawful basis.
However, certain third-party service providers, such as payment gateways and other payment transaction processors, have their own privacy policies in respect to the information we are required to provide to them for your purchase-related transactions.
For these providers, we recommend that you read their privacy policies so you can understand the manner in which your personal information will be handled by these providers.
In particular, remember that certain providers may be located in or have facilities that are located in a different jurisdiction than either you or us. So, if you elect to proceed with a transaction that involves the services of a third-party service provider, then your information may become subject to the laws of the jurisdiction(s) in which that service provider or its facilities are located.
Once you leave our store’s website or are redirected to a third-party website or application, you are no longer governed by this Privacy Policy or our website’s Terms of Service.
Links
When you click on links on our website or user interface, they may direct you away from our site. We are not responsible for the privacy practices of other sites and encourage you to read their privacy statements.
SECTION 7 – SECURITY
To protect your personal information, we take reasonable precautions and follow industry best practices to make sure it is not inappropriately lost, misused, accessed, disclosed, altered or destroyed.
SECTION 8 – DATA RETENTION
In all cases we will only keep your personal information for as long as we have a lawful basis for processing it.
Where you enter into a contract and/or place an order, we will keep your information for the duration of the contract and/or order, and thereafter for such period as we are permitted by law (to comply with financial legislation), or for so long as is necessary for the establishment, exercise or defense of legal claims.
Where you have made a general or specific enquiry but have not entered into a contract or placed an order with us, we will keep your information until that enquiry is resolved.
Where you have expressly consented to and/or subscribed to marketing, newsletters, events information or to any other form of communication, we will keep your information only whilst your consent and/or subscription is valid.
Where we no longer need your information and no longer have a basis for keeping it, we will delete it within six months.
SECTION 9 – COOKIES
To keep track of data, we make use of cookies.
SECTION 10 – AGE OF CONSENT
By using this site, you represent that you are at least the age of majority in your state or province of residence, or that you are the age of majority in your state or province of residence and you have given us your consent to allow any of your minor dependents to use this site.
SECTION 11 – CHANGES TO THIS PRIVACY POLICY
We reserve the right to modify this privacy policy at any time, so please review it frequently. Changes and clarifications will take effect immediately upon their posting on the website and user interface. If we make material changes to this policy, we will notify you here that it has been updated, so that you are aware of what information we collect, how we use it, and under what circumstances, if any, we use and/or disclose it.
If our company is acquired or merged with another company, your information may be transferred to the new owners so that we may continue to sell products to you.
QUESTIONS AND CONTACT INFORMATION
If you would like to: access, correct, amend or delete any personal information we have about you, register a complaint, or simply want more information contact our Privacy Compliance Officer at su*****@********ic.net.
WHAT IS HOLDING YOU BACK?
Didn’t find what you were looking for? Do not get tired, fill in the information below and we will contact you.